

Produtos



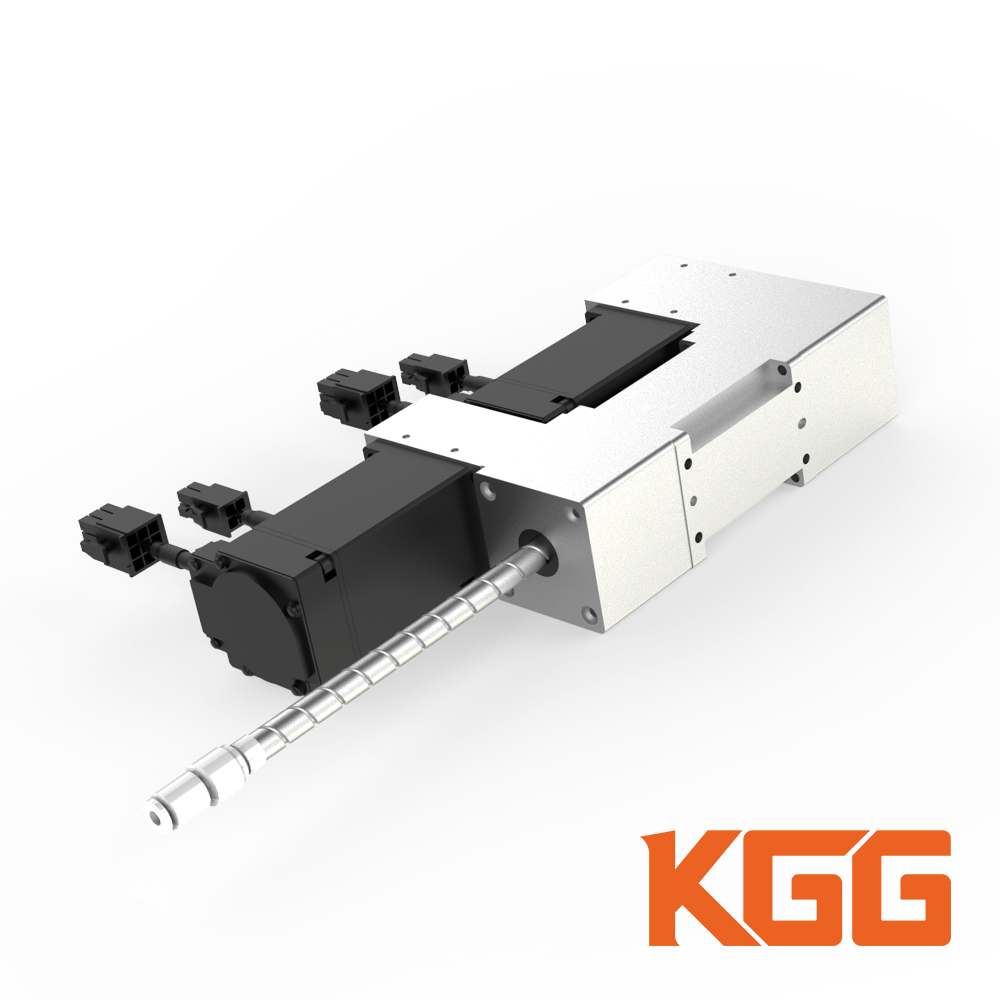


Atuador do eixo ZR
O atuador de eixo ZR utiliza um motor oco para acionar o eixo Z, girando a porca do fuso de esferas para obter movimento linear para cima e para baixo, onde a porca estriada esférica atua como uma estrutura de parada e guia para o eixo do fuso. A porca do fuso de esferas e a porca estriada esférica giram na mesma velocidade e na mesma direção para obter a rotação in situ do eixo de transmissão sem movimento linear para cima e para baixo. O atuador de eixo ZR pode ser usado com múltiplos eixos para economizar tempo e facilitar o manuseio rápido dos componentes.
Vantagens do produto:
01. Folga axial de 0
02. Baixo ruído e movimento suave
03. Construção híbrida compacta e leve
04. Construção de encoder em malha fechada
05. Possibilidade de controle de pressão

Fuso de esferas com estrias esféricas
Os novos produtos que aplicaram a miniatura KGGbtodosstripulação combtodosspline(G-BSS), e realizou três funções, movimento linear (Z), movimento rotativo (θ) e vácuo (V), com um produto.
A forma esguia é alcançada através da condução de umbtodosstripulação e umabtodossplinenmas construído diretamente em umhamarelomotorrinolaringologista.

LinearMação(z)
Linhaorelhapalavraidirigindo umz-eixommotor e girando obtodossequipenut. Neste momento, obtodossplinebut desempenha 'um papel de dispositivo antirrotativo e guia de deslizamento de umsequipescabo.
Rotação((θ)
Vire obtodossequipenut ebtodossplinenmas ao mesmo tempo, mesma velocidade e direção, oso eixo gira sem se mover para cima e para baixo.
Vácuo(V)
FurohO amarelo pode ter múltiplas utilidades. Por exemplo, função de vácuo e sopro.
O corpo super fino é útil para economizar espaço devido à combinação de motor oco + G-BSS (parafuso de esferas em miniatura com ranhura de esferas).
Sem desgaste de pó da correia e polia devido à estrutura de acionamento direto.
O número mínimo de componentes resulta em design simples e economia de espaço.
No caso do motor de tamanho 42, não apenas o movimento linear (Z) e rotativo (Θ;theta), mas também a função de vácuo (V) estão disponíveis.

---Distribuição de líquidos com eixo oco
---Manuseio de componentes de LED de combinação multieixo
---Ajuste de ângulo do wafer IC
---Conjunto de lentes para celular
---Etiquetagem de telefones celulares
---DEMONSTRAÇÃODdemonstrador
Para mais exemplos, clique no vídeo abaixo.
Você verá um sistema de transporte totalmente novo.
É tão simples quanto montar blocos de construção e pode ser projetado com uma variedade de tipos de layout, como circular, pista, quadrado, rampa de saída complexa, giro e híbrido, dependendo do ambiente operacional.
Com os atuadores de eixo KGG ZR operando em conjunto, o transporte não é mais complicado...
| Foto |  |  |  |  |
| Modelo | Tipo ZRIN28 | Tipo ZRIN42 | Tipo ZRFS30S | Tipo ZRFS42S |
| Largura mm | 28 mm | 42 mm | 30 mm | 42 mm |
| Curso máximo mm | 50 mm | 50 mm | 50 mm | 100 mm |
| Força máxima de sustentação | 5N | 19N | 30N | 50N |
| Diâmetro do parafuso mm | 6 mm | 8 mm | 6 mm | 8 mm |
| Baixar PDF | * | * | * | * |
| CAD 2D/3D | * | * | * | * |
Você receberá notícias nossas em breve
Envie-nos sua mensagem. Responderemos em até um dia útil.
Todos os campos marcados com * são obrigatórios.
-

Parafusos de esferas de alta precisão e alto teor de chumbo à prova de ferrugem ...
-

Graxa de alta lubrificação para fuso de esferas
-

Rolo repetível de alta rigidez e alta precisão L...
-

Atuador linear de guia integrado HST
-

Fuso de esferas de precisão de movimento linear KGG GLR com...
-

Miniatura à prova de ferrugem, alta potência e alta velocidade...
-

PT Slide de passo variável
-

Motor de passo e esferas/fuso de avanço externo...
-

Alta rigidez, cargas complexas, operação silenciosa, equilíbrio...
-

Principal




